A thinking robot: part 1
After working a reasonably long time now on game based environments to develop posh-sharp, I wanted to see how well I can get the framework working in robotic applications. As I am also working on a new social robotic approach for a year now, which I cannot disclose yet, I thought about working on a side-project which I can talk about more.
Intelligent embedded agents, or intelligent virtual agents (IVAs) are challenging to develop; they require a large amount of attention to detail to show behaviour that is meaningful and visible to the user. When designing a set of behaviours the amount of detail which the behaviour exhibits creates the illusion of being alive. The more detail the lower the friction between user perceiption and intended design (required work effort goes up exponentially).
As part of my previous work, I spend a long time working in simulated environment (Unity3D) and optimising posh-sharp to work through webGL in the browser. However, I reached a point in the development of posh-sharp and its still hidden successor where for game environments where I am happy with the stability and I want to focus on including evolutionary approaches as part of the development/modelling phase. This also means that I need to nail down the planning and action selection system in terms of time slicing and scheduling on light-weight platforms. To do this, I want to experiment with hard restrictions in a smaller domain (one of my arguments for robotics).
The raspberry pi provides an interesting low-cost platform and allows building versatile IoT systems as well as robotic applications. As a pi is basically an underpowered linux box development is straight forward and the system offers reasonably harsh restrictions in terms of power consumption, battery, sensining capabilties (for reasonable amounts of money), as well as omputational power for planning/reasoning/evolution which suggest an ideal test bed for my cogntive robotics architecture.
Introducing the MonsterBorg
The MonsterBorg is a robust 4 wheeled robotics platform on a sturdy aluminimum chassis with a strong set of motors to carry and move quite a bit of payload. The MonsterBorg is also used in the FormulaPi which is a vision based robotic racing competition. Thus, the platform will potentially be around for a while.
features:
- 4 brushless high-torque motors
- 3mm alu chassis (for good payload)
- high wheel-base and good grippy wheels which allow indoor and outdoor use
- battery-powered for 3h usage
- 8MP colour camera
- existing code-base for remote control using WiFi or autonomous vision based pilot mode
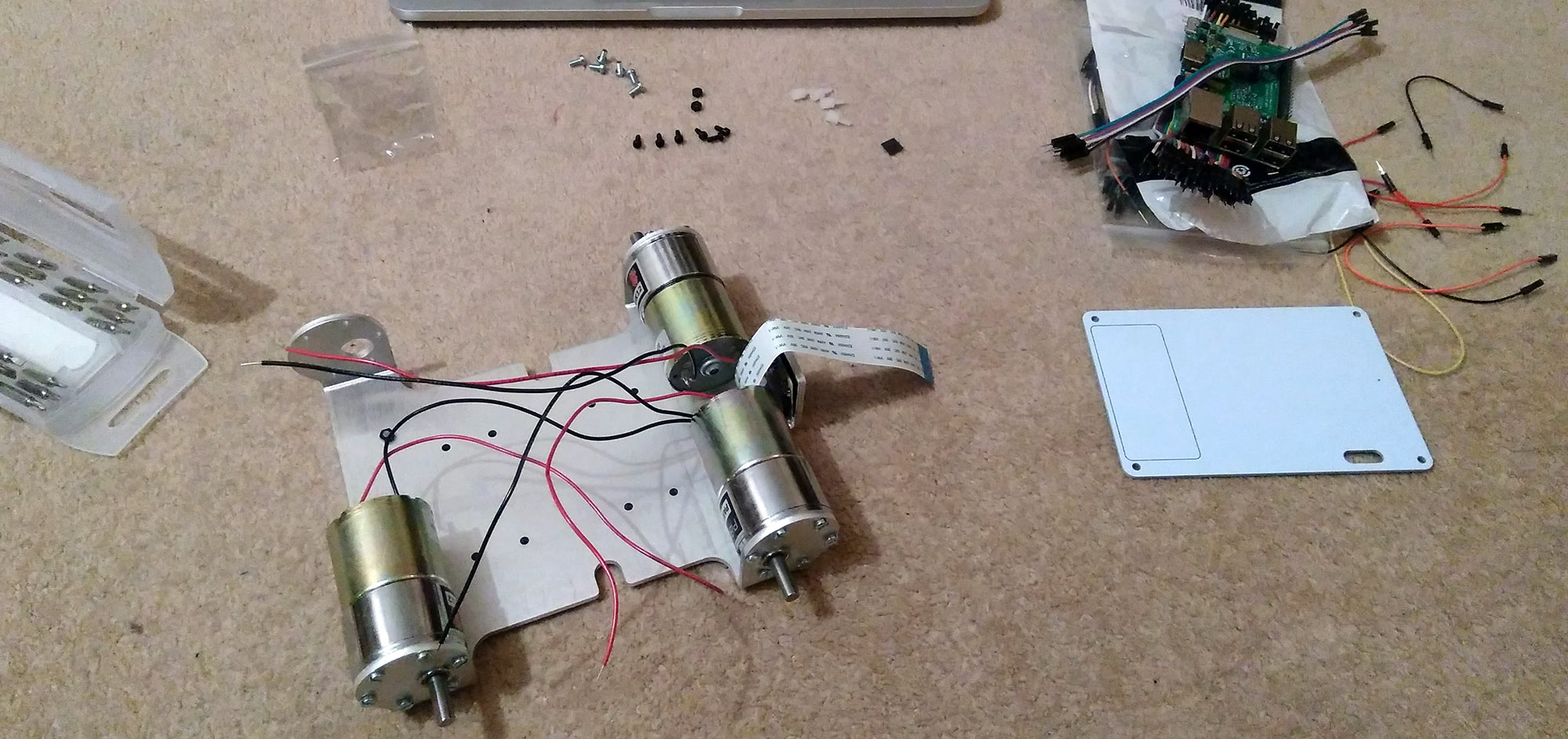
The image shows my half assembled version of the monsterborg which already includes the 8MP camera which I want to use for object recognition and SLAM. in the background the Pi3 is visible.
I was extremely surpised by the build quality of the monsterborg nd the quality of the components for a mere £240. The motor controller also does a really good job and the the robot is capabale of driving in a straight on all surfaces I tried so far even when adding on a reasonable load.
More images and details in the near future including a discussion of the 3D printed chassis I am adding my the extra sensors and to protect my PCBs.